Page 1 :
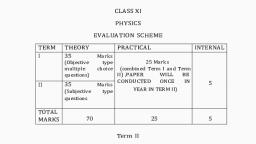
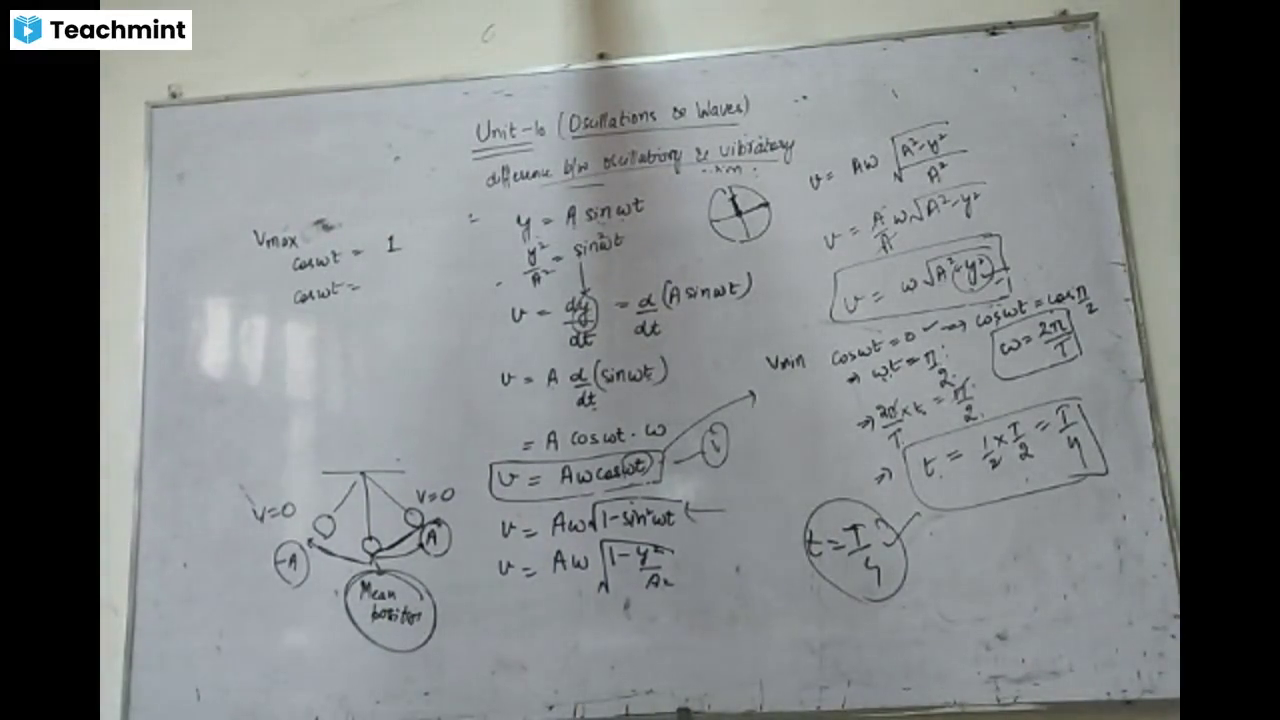
\d, , Periodic Motion. A i SIMPLE HARMON), Erampie Meee Mae tae ni aw equal inane a Periodic moti, Motion of a loaded Sprin ® Plane, motion of ap met, a 4 Planet around the sun Motion of a si, i simple pendulum,, , Oscillatory Motion —, , Simple Harmonic Motion <2, Nat enables it to store kinetic energy Ystem must have elasticity, ; Olection of uniform ci ; 7, Circular path in the anti rach m circular motion- Suppose a particle ith uni i, partie eel ti-clock wise direction. The circular path in Which partich particle moves with uniform speed in a, is called reference particle. Particle revolves is called circle of reference. The, Let particle is Moving with angular Velocity w, Let - aaa, , is Mo a Particle starts from the point ‘x’ ts, ia ae ee ha me “ Let 'r’ be the radius of the eiculee att * <, whict From 'P’, draw a normal PM on yoy’. H i, Projection of P on the y ~axis, Ag ‘P’ Moves x toy, y to xlxto y’and yo j ne xt, n 1 fag, , eroiection Moves from o to Y, ¥ t0 0, 0 to y’and y’to o respectively and so on., etinition of S.H.M- The Projection of uniform circular motion on one of the, ae of the circle is simple harmonic motion,, isplacement- It is defined as the di it iti, , any Reet ae stance of the particle from the mean Position at 4, Rae, ee . frre a circular path with angulat velocity ‘w! in the anti-clock wise direction. Let particle, W=8/t>8 =ut (2s a Fee), In right angle AOMP. ° 4, sin = sin wt= OM / OP = yir>y=rsin wt Su? ap, Maximum value of y — when wt = 1/2 (ie. at the extreme, position), rsint/2=y, y=r (amplitude of displacement), , imum value of y — when wt = 0, y>y=0, , , , , , , , Velocity- velocity of the particle is defined as the rate of change of displacement with respect to time. ’, v=dy =d(rsinwt) =rdsinwt = F[coswt] w = wr cosfwt = wr aint =w V(fPsin’ wt), at dt dt ay, , ~, , At mean position- y = 0 = v = wr (maximum value of velocity) °, , At extreme position- y = r>v =o, , Acceleration — Acceleration of the particle is defined as the rate of change of velocity with respect to time., , a=dv =d(wrcoswt) =wrdcoswt =wr[-sinwt]w = -wr sinust =-w'y f, , at dt dt ye, , a ay (since w is constant) | aT => SuM i, Negative sign shows the opposite behaviour of acceleration and displacement. |, A particle is said to be executing simple harmonic motion 6f its acceleration is directly proportional to the, displacement at that time and directed towards the mean position., At mean position- y=0,a=0 }, At extreme position- a = -w*r ( amplitude of the acceleration) — ~, Time period- Time period is the time taken by the particle in oné vibration/one oscillation., , Unit of time period is seconds,, Frequency-Frequency is defined as number of vibrations per second. It is denoted by v,f orn, ve1/T, Vibration- One vibration is to and fro mo\, , Angular frequency -w=2n/T = 2nv , . a ; :, Phase - The phase of a vibrating particle at any instant is the state as regards its position and direction of motion at that =, , instant with respect to the mean position., The phase of a vibrating particle can be measured in two ways(1) The angle traveled by the line joining to the mean position., Example- The phase of the particle at point ‘y' is 1/2, (2) The time taken by the particle to reach that position, since the particle has, , tion of a particle between any two consecutive passes in the same direction, , Scanned with CamScanner
Page 2 :
- uy, , last passed through the mean Position in the positive direction of motion., Example ~ The phase of the particle at point y is T/4, , Phase Difference-Phase difference between particles P,& P, is, , AD = 0, -0,, , Let us consider @ particle moving in a circular path with angular velocity x4, , w" in the anticlock-wise direction. Let initially particle lying at P;., , Let it moves from P,to P, in time 't, Let 'r' be the radius of the circular path., , Sin (wt + ®) = OM /OP2 = yir => y = Sin (wt + ), , where '' is the initial phase, , y7 Festi oi, Graph for a body executing S.H.M - Wo know that in S.H.M displacement, velocity and’acceleration is given by, , , , , , , , , , , y=rsinot, v= wr coswt, @ = -w'T sinwt, ~ Graph between ‘y'and 't’ is shown in fig (1), Graph between 'v' and 't' is shown in fig (2) y, Graph between ‘a’ and 't’ is shown in fig (3), From the graphs, we conclude that in S.H.M, “he, velocity leads displacement by a phase angle of 1/2 radian,, Acceleration leads velocity by a phase angle of 1/2 radian. Wf wid a, , ; Acceleration leads displacement by a phase angle of t radian, Comparison between the phase of displacement, velocity and acceleration, We know that in S.H.M displacement, velocity and acceleration is given by, , y=rsinwt, , V = wr coswt = wrsin(1/2 + wt) * t, a=-w’r sinwt = w*r sin (1 + wt) : 1, Let ®,, ©, and 3 are the phases for displacement, velocity and acceleration respectively., Therefore, ®,= wt, O2=11/2 + wt, O3= 17+ wt <a, Phase difference between velocity and displacement = ©, -©,= 11/2 + wt — wt = 1/2, Phase difference between acceleration and velocity = ©3— ®2 = 1 + wt - 1/2 + wt = 1/2, , | Phase difference between acceleration and displacement = O3-9,=7+wt-wt=T, v ads displacement by 2 phase angle of m/2 radian., Acceleration leads velocity by a phase angle of 1/2 radian., Acceleration leads displacement by a phase angle of rr radian x, Eneray of the particle has S.H.M —A particle having S.H.M has two types of energies., , (1) Kinetic Energy — Kinetic energy is by virtue of the motion of the body, , Kinetic Energy = % mv’ = % m (wr -y*)? = % m [w? (F-y)] = % mw? - % my?, (2) Potential Energy — Potential Energy of a body is by virtue of the position of the particle., , We Know that,, In S.H.M acceleration at any point is directly proportional to the displacement, , aay, , a = -w’y (since w is constant) / /, If 'm' be the mass of the particle executing S.H.M., the restoring force ‘F’ acting on the body or particle at any, , instant., F=ma =m(-w’y) =-m w’y, F=mw’y (only in magnitude) / / /, If the particle goes infinitely small distance dy, the work done dw by the particle against the restoring force., dw = Fdy = mu’y.dy / a a a pesy, Total work can be calculated by integrating within the proper limits. :, w= finu"y dy = | uu 2\3= mw (y?-0') = my, , 2 i 2, , This work is stored (converted) as potential energy (U), , 2,, Therefore, Potential Energy (U) = % mw*y, Total energy = K.E + P.E. =(% mw’? -% mw’y’) + % my? = % mw?, GRAPH-As ‘y' increases; P.E. increases and becomes maximum at extreme position., At the same time K.E. decreases and becomes zero at extreme position, while at the yn, , ition body has K.E and no P.E , but, total energy is same at every point. ! - <, Dynamics of a havmonie oscillation- When a body acquires S.H.M. a restoring force sets up which tries to'bfing the ody, , to its original (mean) position and this restoring force (F) at any point on the body is directly proportional to the, displacement and always acts towards the mean position, , , , , , , , , , "a, , , , Scanned with CamScanner
Page 3 :
Fay =F =-ky — tN Where 'k’ is constant of proportionality called ‘spring constant., , _ Fema =-mu%y--(2, , From equation (1) and (2) we get <3 56g ee, dy =-mwy = k= me an ew? we Vidm => 20/7 =Vkim = T= 2n vin/k where 'm’ is called inertia factor, and 'k’ is called Spring factor,, Application of S.H.M. - ‘mn i to, Motion of a loaded spring - Consider a spring AB having length ‘L' of negligible mass. When a mass Coe reaps, the spring then, length of the spring increases by ‘I. At the same time the restoring force comes into play, oe tries to retain its original length. According to Hooke's law, the restoring force ‘F' is given by, , =-kI (1) where ‘k' is spring constant ‘ i i, The negative sign indicates that vis mtersten take place downward; the restoring force aa upwards in the opposite, direction. 4, Also, F = -mg ------ (2), From eq (1) and (2) we get, -mg = -kl > mg = kl ;, Suppose we stretch the spring further by pulling it down through a distance ‘y’ j, The total extension will become (| + y) and the restoring force will increase to F, From Hooke's law, F’=-k (I +y),------- (3) ., This additional restoring force F— F will produce an oscillation in the spring., Let ‘a’ be the acceleration in the spring, F-F=ma, “k(i+y)-(-kl) =ma= -kl-ky +kl=ma=>-ky =ma=>a=-ky/m, a=ky/m = yla= milk ----~- (4), Since k & m are constants, So, aay, , , , , , ~ Since, acceleration is directly proportional to displacement with a negative sign. So, the motion of a loaded spring is, , S.H.M, Time Period - T = 2m Vy/a ------ (5), , From equation (4) & (5) we get,, T=2nVm/k, Discussion —, , (1) Tavm, , (2) Ta 1/ vk, , a Mass of a loaded spring is always independent of g (i.e., acceleration due to gravity), , (4) In case of spring freely falling, the time period of the spring will not change., Simple pendulumIdeal Definition - The simple pendulum is a heavy point mass suspended by a weight less, inextensible and a perfectly, flexible string from rigid support about which it can vibrate freely. No ideal pendulum exists in the universe., , In actual practice, simple pendulum is a small, heavy metallic bob suspended with the help of a fine thread. The, point from which the pendulum is suspended is called point of suspension. Since mass of thread is very less as compared, to the mass of the bob, so we can consider center of gravity of the pendulum exists inside the bob and that point is called, point of oscillation., , The distance between point of oscillations and point of suspension is called length of the pendulum., , Let us consider a simple pendulum having length |., Consider that the metallic bob is dis, Let OA=y, 8=y/I, When the bob is in position A, it will experience the following forces(1) weight (mg) acting vertically downward., (2) tension (T) acting along AS, weight (mg) can be resolved into two components., (a) mgcos6 opposite to the tension T, i.e, T= mgcosd, (b) mgsin@ which provides the restoring force (F), = -mgsin@, 'f@is small, sin@~@, F = -mg@ = -mg y/|, But F = ma, ma = -mg y/I, a= -gy/! (since g&lare constants), aay, , Scanned with CamScanner, , , , placed and angular displacement 0 from the mean Position (equilibrium position) ~—
Page 4 :
Since acceleration is di is, ion is directly proportional to the displacement with a Negative sign. So, motion of the simple pendulum is, , S.H.M, Only in magnitude a=gy/Il = y/la=l/g, T=20wWy/a =2nVl/, Main Points : 8, (1) T is independent of mass ‘m', (2) T depends upon the acceleration due to gravity 'g’, , , , Ss R i, a endalunt Second pendulum is a pendulum whose time period is 2 seconds, g StemVi/g > 1/1 =VI/g> m=l/gog/t =| > 9.8/ nm =.993m~ 1m, , Free oscillations, Forced oscillati, , scille lons and ResonanceFree Vi = is sai i i, , ibrations- A body is said to be executing free vibrations, if it vibrates freely with its natural frequency., , The frequency of the vibrations depends upon- :, (1) Mass of the body (2) Dimension of the body (3) Restoring force, , =1Vor het i Vo = 1 Vk/m where ‘k’ is known as spring factor and ‘m’ is known as inertia factor., , 2m, prampte (1) baie of simple pendulum (2) vibrations of tuning fork (3) vibrations in the wire of sonometer., ns- A body is said to be executing force vibrations if it vibrates with a frequency other than its natural, , peguency under the effect of an external periodic force., xample- (1) When the stem of a vibrating tuning fork is pressed against the table, the table starts vibrating. The, , pi he aera in the table are forced vibrations., esonance- When the natural frequency of the oscillations is different then the exte! iodi i i, =e mal periodic, forced oscillations are called non resonant. pe aT —, The amplitude of non-resonant oscillations is not very large. The transfer of energy to the oscillator is also small, Resonant oscillations- When the natural frequency of the oscillations is equal to the frequency of the external periodic, , force acting on it, the oscillations are called resonant., , Example- (1) Resonance causes disaster during earthquake. When the natural frequency of the building becomes equal, , to the frequency of the periodic vibrations present in the earth during earthquake, then the building starts vibrating witn, , tar ses., , (2) Soldiers of marching troops are ordered to break their steps while crossing over a bridge. This is because if the, f the steps of the soldiers, it starts vibrating with large amplitude and, , frequency of the bridge matches with the frequency o}, hence gets damaged., Undamed Oscillations- The oscillations in which the amplitude of the vibrations mi Ny \ = \ Ae, does not change with time is called undamed oscillations. _ s UW Ve, Damed Oscillations- The oscillations in which the amplitude of the vibrations EO ubisties Coed eet, decreases with the time are called damed oscillations. Ur chad Goes TO ante, Maintained Oscillations (Sustained Oscillations) — If we supply energy from the external source to the damed, oscillations the amplitude of the damed oscillations can be maintained constant is called maintained oscillations or, sustained oscillations. x, Coupled oscillations- The two or more oscillations linked together in such a way that the exchange of energy takes, place between them is called coupled oscillators. The oscillations produced by coupled oscillators are known as coupled =~, oscillations. : “, Examples of coupled oscillators- /, ith their bobs attached to each other by means of a spring /, The middle spring provides the coupling., , (1) Two simple pendulum wi D, (2) Two masses attached to each other by three springs., ing is tight and transfer of energy is, , (3) The two coupled LC circuits ; , ; ,;, The transfer of energy from one oscillator to the other oscillator is large if the coup, small if the coupling is loose., , tarae amplitude and hence it collap:, , Scanned with CamScanner