Page 1 :
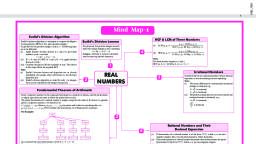
2, , MATHEMATICS, , Mind Map-1, Euclid’s Division Algorithm, Euclid’s division algorithm is a technique to compute the Highest, Common Factor (HCF) of two given positive integers., To get HCF of two positive integers c and d, c > d following steps, are to be followed:, (i) Apply Euclid’s division lemma to c and d to get whole, numbers q and r such that, c = dq + r, 0 ≤ r < d., (ii) If r = 0, then d is HCF of c and d. If r ≠ 0, apply division, lemma to d and r., (iii) Continue the process till the remainder is zero. The divisor, at this stage will be the required HCF., Note:, (i) Euclid’s division lemma and algorithm are so closely, interlinked that people often call former as the division, algorithm also., (ii) Euclid’s division algorithm is stated for only +ve integers, but it can be extended for all integers except zero., , HCF & LCM of Three Numbers, , Euclid’s Division Lemma, For given any two positive integers a and b,, there exist unique integers q and r satisfying, a = bq + r, 0 ≤ r < b, Lemma : A lemma is a proven statement, used for proving another statement., , 4, , LCM (p, q, r) =, , p ⋅ q ⋅ r ⋅ HCF( p, q, r ), HCF ( p, q) ⋅ HCF(q, r ) ⋅ HCF( p, r ), , (ii), , HCF (p, q, r) =, , p ⋅ q ⋅ r ⋅ LCM ( p, q, r ), LCM ( p, q ) ⋅ LCM (q, r ) ⋅ LCM ( p, r ), , Note:, For three positive integers a, b and c, HCF (a, b, c) × LCM (a, b, c) ≠ a × b × c, , 1, 2, , (i), , Irrational Numbers, , REAL, NUMBERS, , 5, , Fundamental Theorem of Arithmetic, Every composite number can be expressed (factorised) as a product of primes, and this factorisation, is unique, apart from the order in which the prime factors occur., The prime factorisation of a natural number is unique, except for the order of its factors. In general,, given a composite number x, we factorise it as, x = p1p2p3 ........pn, where p1, p2, p3 ............, pn are primes and written in ascending order, i.e.,, p1 ≤ p2 ≤ p3 ≤ ..........≤ pn. If we combine the same primes, we will get powers of primes., , Number which is not a rational number or whose decimal, expansion is non-terminating and non-repeating., Note:, (i) The sum or difference of a rational and an irrational, number is irrational, e.g.,, 2 + 2 is irrational,, 2 − 3 is irrational., (ii) The product and quotient of a non-zero rational and, irrational number is irrational, e.g.,, 5 × 2 is irrational,, 2, is irrational., 3, , For Example:, , 3, , 156, , 2 × 78, , 2 × 2 × 39, , 2 × 2 × 3 × 13, , 3 × 52, , 3 × 2 × 26, , 3 × 2 × 2 × 13, , 4 ×39, , 4 × 3 × 13, , 2 × 2 × 3 × 13, , 6 ×26, , 6 × 2 × 13, , 2 × 3 × 2 ×13, , So, in each of the cases prime factors of 156 is 2 × 2 × 3 × 13, Hence, we can conclude that the prime factorisation of a number is unique., Note:, (i) For two positive integers a, b, HCF (a, b) × LCM (a, b) = a × b, (ii) If p is a prime number and it divides a2, then p also, divides a where ‘a’ is the positive integer., , 6, , Rational Numbers and Their, Decimal Expansion, If denominator of a rational number is of the form 2n 5m, where n, m are nonnegative integers then x has decimal expansion which terminates., (ii) If decimal expansion of rational number terminates then its denominator has prime, factorisation of the form 2n 5m, where n, m are non-negative integers., (iii) If denominator of a rational number is not of the form 2n 5m, where n and m are, non-negative integers then the rational number has decimal expansion which is, non-terminating repeating., Thus we conclude that the decimal expansion of every rational number is either, terminating or non-terminating repeating., , (i), , EBD_7529, , 1, , MIND MAPS, , 3
Page 2 :
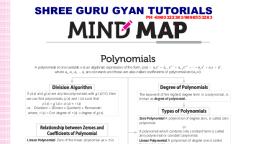
42, , MATHEMATICS, , MIND MAPS, , 5, , Mind Map-2, Types of Polynomial, On the basis of number of, terms in the polynomial, (i), , Monomial:, If polynomial has, one term, (ii) Binomial:, If polynomial has, two terms., (iii) Trinomial:, If polynomial has, three terms., , On the basis of degree of, the polynomial, (i), , Linear:, If polynomial has, degree one., (ii) Quadratic:, If polynomial has, degree two., (iii) Cubic:, If polynomial has, degree three., (iv) Biquadratic:, If polynomial has, degree four., , Note that 5, 6, – 9 etc are called constant polynomial as, there value is fixed and constant polynomial 0 is called, zero polynomial whose degree is not defined., , Standard Forms of Linear,, Quadratic and Cubic Polynomials, (i), , Linear Polynomial:, , Polynomial, , Cases of Quadratic Polynomial, , 7, , An algebraic expression f(x) of the form, f ( x) = a0 + a1 x + a2 x 2 + .... + an x n ,, where a0, a1, ....., an are real numbers and all indices of, variable x are non-negative integers is called polynomial, in variable x., (i) The highest power of x is called degree of the, polynomial., (ii) a0 , a1 x,...., an x n are terms of the polynomial., , (i), , (iii) a0 , a1 ,....an are co-efficients of the polynomial., , (ii), , 2, 3, , POLYNOMIALS, 4, , 5, , 6, , ax + b, where a, b are real numbers and a ≠ 0., (ii), , Quadratic Polynomial:, ax2 + bx + c, where a, b, c are real numbers & a ≠ 0., , (iii) Cubic Polynomials:, , Geometrical Meaning of, Zeroes of a Polynomial, , ax3 + bx2 + cx + d, where a, b, c, d are real numbers, and a ≠ 0., , Value of a Polynomial, The value of a polynomial f(x) at x = α is obtained, by substituting x = α in the given polynomial and is, denoted by f(α)., , Zero(es)/Root(s) of Polynomial, x = r is a zero of a polynomial p(x) if p(r) = 0., , b, a, If α and β are the zeroes of the quadratic polynomial, ax2 + bx + c, then, b, α+β = −, a, c, Coefficient of x, i.e. sum of zeroes = −, and αβ =, a, Coefficient of x 2, Zero of a linear polynomial ax + b is x = −, , i.e. product of zeroes =, , 9, , Coefficient of x, , Coefficient of x, , 3, , & αβγ = −, , i.e. product of roots = −, , Y, , B, , A, , X, , X', , Y', , A, , B, , X, , Y', , Case-II : If a quadratic polynomial P(x) = ax2 + bx + c has, only one zero, then its graph will touch the x-axis at only, one point A as shown in the figure., , Y, , Y, , 2, , Coefficient of x 2, i.e. sum of zeroes = –, Coefficient of x3, c, αβ + βγ + γα =, a, i.e. sum of product of every two root, Coefficient of x, , X', , Constant term, , (iii) If α, β and γ are zeroes of the cubic polynomial, ax3 + bx2 + cx + d then, b, α+β+ γ = −, a, , =, , Y, Zero(es) of a polynomial, is/are the x-coordinate of the, point(s) where graph y = f (x), X, X�, intersects the x-axis., (i) Linear polynomial: Graph of, Y�, linear polynomial is a straight, line and has exactly one zero., (ii) Quadratic polynomial: Graph of quadratic, polynomial is always a parabola and this, polynomial can have atmost two zeroes., (iii) Cubic polynomial: Cubic polynomial can have, atmost three zeroes., , Y, , Relationship between Zeroes, and Coefficients of a Polynomial, , 8, , 1, , Case-I : If a quadratic polynomial P(x) = ax2 + bx + c has, two zeroes, then its graph will intersect the x-axis at two, distinct points A & B as shown in the figure., , d, a, , A, , X', , X, , X, , X', A, , Y', , Y', , Case-III: If a quadratic polynomial P(x) = ax2 + bx + c has, no zero, then its graph will not intersect /touch the x-axis at, any point as shown in the figure., Y, Y, , Constant term, Coefficient of x3, , X', , X, , X, , X', , Division Algorithm, If p(x) and g(x) are any two polynomials with g(x) ≠ 0,, then we can find polynomials q(x) and r(x) such that, p(x) = g(x) × q(x) + r(x), where either r(x) = 0 or degree of r(x) < degree of g(x), , Y', , Y'
Page 3 :
MATHEMATICS, , Representation of Linear, Equation In Two Variables, , System of a Pair of Linear, Equations in Two Variables, , Ploting Linear Equation in Two, Variables on the Graph, There are infinitely many solutions of each linear, equation. So, we choose at least any two values of one, variable & get the value of other variable by substitution., i.e; Consider; Ax + By + C = 0, We can write the above linear equation as:, −C − Ax, y=, ., B, Here, we can choose any values of x & can find, corresponding values of y., After getting the values of (x, y) we plot them on, the graph thereby getting the line representing, Ax + By + C = 0., , Algebraic Method of Solution, Consider the follwing system of equation, a1x + b1 y + c1 = 0; a2 x + b2 y + c2 = 0, , Graphical Method of Solution, , An equations of the form Ax + By + C = 0 is called a, linear equation in two variables x and y where A, B, C, are real numbers., Two linear equations in the same two variables are called, a pair of linear equations in two variables. Standard form, of linear equations in two variables., a1x + b1 y + c1 = 0, a2 x + b2 y + c2 = 0, , 2, , Coordinate of the point (x, y) which satisfy, the system of pair of linear equations in two, variables is the required solution. This is the, point where the two lines representing the two, equations intersect each other., There are two methods of finding solution of, a pair of Linear equations in two variables., (1) Graphical Method : This method is less, convenient when point representing the, solution has non-integral co-ordinates., (2) Algebraic Method : This method is more, convenient when point representing the, solution has non-integral co-ordinates., This method is further divided into three, methods:, (i) Substitution Method,, (ii) Elimination Method and, (iii) Cross Multiplication Method., , 37, , Mind Map-3, , Every linear equation in two variables graphically, represents a line and each solution (x, y) of a linear, equation in two variables, ax + by + c = 0, corresponds to a, point on the line representing the equation, and vice versa., , Method of Solution of a, Pair of Linear Equations, in Two Variables, , MIND MAPS, , In this method, two equations are plotted separately in, a single graph (as discussed in box-3)., Case-I:, l2, l1, , P(x, y), , (intersecting lines), , where a1, a2 , b1, b2 , c1, c2 are real numbers such that, a12 + b12 ≠ 0, a22 + b22 ≠ 0, , Solution = P(x, y)., Case-II:, , l1, , 1, , PAIR OF LINEAR, EQUATIONS IN, TWO VARIABLES, , 3, , l2, , 6, no solution, Case-III:, , 5, , 4, , (parallel lines), , Q(x1, y1), , b1, , l1, , (coincident lines), Infinite set of solution, some of which are : Q(x1, y1), & R(x2, y2), , Consider the standard form of linear equations in two, variables., a1x + b1y + c1 = 0; a2x + b2y + c2 = 0, While solving the above system of equation following three, cases arise., , a, b, If 1 � 1 ;system is called consistent, having one or, a2, , (ii), , b2, , unique solution and pair of straight lines representing, the above equations intersect at one point only., a1 b1 c1, ; system is called dependent and have, If = =, a2 b2 c2, infinitely many solution. Pair of lines representing the, equations coincide., , a, b, c, (iii) If 1 � 1 � 1 ; system is called inconsistent and has, a2, , b2, , c2, , no solution. Pair of lines representing the equations are, parallel or do not intersect at any point., , R(x2, y2), , l2, , x, , ct, , du, , ro, II P, , c1, , b2, , y, , ct, , du, , ro, II P, , a1, , IP, , IP, , rod, , rod, , Consistency and Nature of the, Graphs, , (i), , There are following three methods under Algebraic, method to solve the above system., (i) Substitution method, (a) Find the value of one variable, say y in terms, of x or x in terms of y from one equation., (b) Substitute this value in second equation to get, equation in one variable and find solution., (c) Now substitute the value/solution so obtained, in step (b) in the equation got in step (a)., (ii) Elimination Method, (a) If coefficient of any one variable are not same, in both the equation multiply both the equation, with suitable non-zero constants to make, coefficient of any one variable numerically, equal., (b) Add or subtract the equations so obtained to, get equation in one variable and solve it., (c) Now substitute the value of the variable got in, the above step in either of the original equation, to get value of the other variable., (iii) Cross multiplication method, For the pair of Linear equations intwo variables:, a1x + b1y + c1 = 0, a2x + b2y + c2 = 0, Consider the following diagram., , uct, , c2, , uct, , a2, , I, , uct, rod, II P, IP, rod, uct, , b1, , b2, , x, y, 1, =, =, b1c2 − b2c1 c1a2 − c2 a1 a1b2 − a2b1, Solve it to get the solution, provided a1b2 − a2b1 ≠ 0, Write equations as, , 7, 8, , Equations Reducible to a Pair of Linear Equations in Two Variables, Sometimes pair of equations are not linear (or not in standard form), then they are altered so that they reduce to a pair of, linear equations in standard form., For example;, a1 b1, a, b, + = c1 2 − 2 = c2, x y, y, ; x, 1, 1, Here we substitute, = p=, q, the above equations reduces to:, &, x, y, a1p + b1q = c1 ; a2p – b2q = c2, Now we can use any method to solve them., , EBD_7529, , 6
Page 4 :
84, , MATHEMATICS, , MIND MAPS, , 9, , Mind Map-4, Quadratic Equation, Standard from of the quadratic equation in the variable, x is an equation of the form ax2 + bx + c = 0, where a,, b, c are real numbers and a ≠ 0., Any equation of the form P(x) = 0, where P(x) is a, polynomial of degree 2, is a quadratic equation., , Zero(es)/Root(s) of Quadratic, Equation, , In this method we find the roots of a quadratic equation, (ax2 + bx + c = 0) by factorising LHS it into two linear, factors and equating each factor to zero, e.g.,, 6x2 – x – 2 = 0, ⇒ 6x2 + 3x – 4x – 2 = 0, ...(i), ⇒ 3x (2x + 1) – 2(2x + 1) = 0, ⇒ (3x – 2) (2x + 1) = 0, ⇒ 3x – 2 = 0 or 2x + 1 = 0, 2, −1, x = or x =, ⇒, 3, 2, , 1, 5, , 2, , A real number α is said to be a root of the quadratic, equation ax2 + bx + c = 0, a ≠ 0 if aα2 + bα + c = 0., We can say that x = α, is a solution of the quadratic, equation or that α satisfies the quadratic equation., The zeroes of the quadratic polynomial ax2 + bx + c, and the roots of the equation ax2 + bx + c = 0 are same., A quadratic equation has atmost two roots/zeroes., , Relation Between Zeroes and, Co-efficient of a Quadratic Equation, , Necessary Condition : Product of 1st and last terms of, eq. (i) should be equal to product of 2nd and 3rd terms, of the same equation., , ⇒, , sum of zeroes = –, and αβ =, , ⇒, , b, a, coefficient of x, , coefficient of x 2, , c, a, , product of zeroes =, , constant term, , coefficient of x 2, , This is the method of converting L.H.S. of a, quadratic equation which is not a perfect square, into the sum or difference of a perfect square and, a constant by adding and subtracting the suitable, constant terms. E.g,, (1) x2 + 4x – 5 = 0, ⇒ x2 + 2(2)(x) – 5 = 0, ⇒ x2 + 2(2)(x) + (2)2 – (2)2 – 5 = 0, ⇒ (x + 2)2 – 4 – 5 = 0, ⇒ (x + 2)2 – 9 = 0, ⇒ x+2=±3, ⇒ x = –5, 1, (2) 3x2 – 5x + 2 = 0, ⇒, , 6, , QUADRATIC, EQUATIONS, 3, , 4, , Methods of Solving, Quadratic Equation, Following are the methods which are used, to solve quadratic equations:, (i) Factorisation., (ii) Completing the square., (iii) Quadratic Formula., , ⇒, , 5, 2, x2 − x + = 0, 3, 3, 1, 5, 2, , , x2 − 2 x + = 0, 23, 3, 2, , Quadratic Formula, , 7, , If α and β are zeroes of the quadratic equation, ax2 + bx + c = 0, where a, b, c are real numebrs and, a ≠ 0, then, , α+β = −, , Method of Completing the, Square, , Methods of Factorisation, , 8, , Consider a quadratic equation:, ax2 + bx + c = 0., If b2 – 4ac ≥ 0, then the roots of the above equation, are given by:, , x=, , −b ± b 2 − 4ac, 2a, , Nature of Roots, For quadratic equation ax2 + bx + c = 0, (a ≠ 0), value of (b2 – 4ac) is called discriminant of the, equation and denoted as D., ∴ D = b2 – 4ac, Discriminant is very important in finding nature of the, roots., (i) If D = 0, then roots are real and equal., (ii) If D > 0, then roots are real and unequal, (iii) If D < 0, then roots are not real., , 2, , ⇒, , 2 5 5, 5, x2 − 2 x + + − = 0, 6, 3 6 6, , , ⇒, , 5 2 25, , =0, x− + −, 6 3 36, , , ⇒, , 5, 1, , x− =, 6, 36, , , , ⇒, , x−, , ⇒, , x = 1,, , 2, , 2, , 5, 1, =±, 6, 6, , 2, ., 3
Page 5 :
10, , MATHEMATICS, , Mind Map-5, Arithmetic Progression (AP), , nth Term (or General Term) of, an Arithmetic Progressions, , Consider, (i) 1, 2, 3, 4, .........., (ii) 3, 3, 3, 3, .........., (i) and (ii) are the sequence of numbers, each number, in these sequences is called a term., An arithmetic progression (AP) is a sequence of numbers, in which each term is obtained by adding a fixed number, ‘d’ to the preceeding term, except the first term., The fixed number is caled the common difference. It can, be positive, negative or zero., Any Arithmetic progression can be represented as :, a, a + d, a + 2d, a + 3d, ......, where ‘a’ is the first term & ‘d’ is the common difference., Arithmetic progressions which does not have a last term, are called Infinite Arithmetic Progression. e.g.;, 6, 9, 12, 15, ................., , 3, , In an AP, with first term ‘a’ and common difference d,, the nth term (or the general term) is given by,, an = a + (n – 1)d, Note that an AP can be finite or infinite according to as, the number of terms are finite or infinite., If there are m terms in an AP, then am is the last term &, is sometimes denoted by ‘l’., , Sum of the FIRST ‘n’ Terms of an, A.P., (i), , 1, , Formula for Common, Difference (d), A sequence of numbers a1, a2, a3...... is an AP if the, difference a2 – a1, a3 – a2, a4 – a3.... gives the same value,, i.e. if ak+1 – ak is the same for different values of k. The, difference (ak+1 – ak) is called common difference (d)., Here ak +1 & ak are the (k + 1)th & kth terms respectively., ∴ d = a2 − a1 = a3 − a2 = a4 − a3 ........, , ARITHMETIC, PROGRESSIONS, , 4, , 2, 5, , The sum of the first n terms of an A.P. is given by, n, Sn = [2a + (n − 1)d ],, 2, where a is the first term and d is the common, difference., (ii) If l is the last term of the finite A.P. say the nth, term, then the sum of all terms of the A.P. is, given by,, n, Sn = [a + l ], 2, Note that sum of first n positive integers is given by, n(n + 1), Sn =, 2, , Arithmetic Mean Between, Two Numbers, If a, b, c are in AP. Then b is called the arithmetic mean, of a & c and is given by, a+c, b=, 2, , EBD_7529, , 511, , MIND MAPS
Page 6 :
126, , MATHEMATICS, , MIND MAPS, , 13, , Mind Map-6, Similar Figures, Two figures having the same shape but not necessarily, the same size are called similar figures, Two figures having the same shape as well as same size, are called congruent figures., Note that all congruent figures are similar but the similar, figures need not be congruent., , Criteria For Similarity of, Triangles, , 1, , 5, , 2, , Similarity of Polygons, Two polygons of the same number of sides are similar if, (i) their corresponding angles are equal and, (ii) their corresponding sides are in the same ratio (or, proportion)., , (i), , AAA Similarity Criterion : If in two triangles, corresponding angles are equal,, then their corresponding sides are in the same ratio and hence the two triangles, are similar., (ii) AA Similarity Criterion : If in two triangles, two angles of one triangle are, respectively equal to the two angles of the other triangle, then the two triangles, are similar., (iii) SSS Similarity Criterion : If in two triangles, corresponding sides are in the, same ratio then their correspoding angles are equal and hence the triangles are, similar., (iv) SAS Similarity Criterion : If one angle of a triangle is equal to one angle, of another triangle and the sides including these angles are in the same ratio, (proportion), then the two triangles are similar., , Areas of Similar Triangles, Similarity of Triangles, Two trianlges are similar if, (i) their corresponding angles are equal and, (ii) their corresponding sides are in the same ratio (or, proportion)., Note : If the corresponding angles of two triangles are, equal, then they are known as equiangular triangles., The ratio of any two corresponding sides in two, equiangular triangles is always the same., , 3, , TRIANGLES, , The ratio of the areas of two similar triangles is equal, to the ratio of the squares fo their corresponding sides, thus if ∆ABC – ∆PQR, then, Area (∆ABC ) AB 2 BC 2 AC 2, =, =, =, Area (∆PQR ) PQ 2 QR 2 PR 2, , 6, , B, , Basic Proportionality Theorem, (BPT) and its Converse, Basic Proportionality Theorem, If a line is drawn parallel to one side of a triangle to, intersect the other two sides in distinct points, then other, two sides are divided in the same ratio. Thus in ∆ABC,, A, if DE || BC, then, , AD AE, =, DB EX, Converse of BPT, , D, , E, , C, B, If a line divides any two sides of a triangle in the same, ratio, then the line is parallel to the third side,, , P, , A, , C, , Pythagoras Theorem and its Converse, , 4, , (i), , 7, , If perpendicular is drawn from the vertex of the right angle of a, right triangle to the hypotenuse then the triangles on both sides of, the perpendicular are similar to the whole triangle and also to each, other., A, (ii) Pythagoras Theorem : In a right triangle, the, square of the hypotenuse is equal to the sum, of the squares of the other two sides. Thus in, right ∆ABC right angled at B, B, C, AC2 = AB2 + BC2, (iii) Converse of Pythagoras Theorem : If in a trinagle, square of one, side is equal to the sum of the squares of the other two sides, then, the angle opposite the first side is a right angle., , Q, , R
Page 7 :
14, , MATHEMATICS, , Mind Map-7, Section Formula, , 4, , Coordinate of a Point in, XY- Plane, , m1, (i), , 1, , The perpendicular distance of x a point from the y-axis, is called its x-coordinate or abscissa. The perpendicular, distance y of a point from the x-axis is called its, y-coordinate or ordinate. The x and y taken together in, order is called coordinate of a point denoted by (x, y)., The coordinate of the points on x-axis are of the form, (x, 0) and the points on the y-axis are of the form (0, y)., Coordinate of origin is (0, 0)., , The x and y-axis divide the plane into four parts known, as quadrants denoted by I, II, III and IV. The sign of, x-and y-coordinates in each of the quadrant is shown, below:, Y, II, I, , (– , +) (+, +), X', , X, III, , IV, (– , – ) (+, – ), , 2, , P(x, y), B(x2, y2), A(x1, y1), The coordinates of the point P(x, y) which divides the line segment joining the, PA m1, are, points A(xl, yl) and B(x2, y2) externally in the ratio, m1 : m2 i.e.,, =, PB m2, m1x2 − m2 x1 m1 y2 − m2 y1 , m −m , m −m, , 1, 2, 1, 2, , , , (iii) If the ratio in which P divides AB is K : 1, then the coordinates of the point P, will be, Kx2 + x1 Ky2 + y1 , ,, , , K +1, K +1 , , COORDINATE, GEOMETRY, , 5, 6, , Distance Formula, , PQ = ( x1 − x2 ) 2 + ( y1 − y2 ) 2, Also the distance of the point P(x1, y1) from the origin is, x12 + y12, , B(x2, y2), , m1x2 + m2 x1 m1 y2 + m2 y1 , m +m , m +m, , 1, 2, 1, 2, , , , Y', , The distance between any two points, P(x1, y1) and Q(x2, y2) in the plane is given by,, , P(x, y), , The coordinates of the point P(x, y) which divides the line segment joining the, PA m1, =, points A(xl, yl) and B(x2, y2) internally in the ratio ml : m2 i.e.,, are, PB m2, , (ii), , Sign-conventions in, the XY-Plane, , A(x1, y1), , m2, , 3, , Area of a Triangle, The area of ∆ABC formed by the vertices A(x1,y1),, B(x2, y2) and C(x3,y3) is given by, 1, | x1 ( y2 − y3 ) + x2 ( y3 − y1 ) + x3 ( y1 − y2 ) |, 2, Note:, 1, (i) Area of triangle = 2 × base × Altitude, (ii) Area of polygon can be calculated by dividing it, into the triangular region., (iii) If three points are collinear then area of the triangle, formed by them is zero., , Mid-point Formula, The coordinates of the mid point P of the, line segment joining the points A(xl, yl) and, B(x2, y2) is, x1 + x2 y1 + y2 , ,, , , 2, 2 , , EBD_7529, , 7, 15, , MIND MAPS
Page 8 :
16, 8, , MATHEMATICS, , MIND MAPS, , 17, , Mind Map-8, Trigonometry, Trigonometry is the study of relationships between the, sides and angles of a right angled triangle., , Trigonometric Ratios of, Some Specific Angles, , 3, , 1, , Trigonometric Ratios, Trigonometric ratios of an acute angle in a right triangle express the, relationship between the angle and the length of its sides., Let ∆ABC be a triangle right angled at B. Then the trigonometric ratios, of the angle A in right ∆ABC are defined as follows:, , nus, , te, ypo, , H, , A, , sine of ∠A i.e. sinA =, , Side adjacent B, to angle A, , sin A, , 0, , 1, 2, , 1, , cos A, , 1, , 3, 2, , 1, , tan A, , 0, , 2, , 30° 45° 60°, , Not, defined, , sec A, , 1, , cot A, , Not, defined, , 1, 3, , 2, 2, 1, , 2, , 2, , 2, , 2, , 3, 3, , 1, , 90°, , 3, 2, , 1, , 1, 2, , 0, , 3, 2, 3, 2, 1, 3, , Not, d, defined, 1, Not, defined, 0, , Side opposite to ∠A BC, =, hypotenuse, AC, , cosine of ∠A i.e. cosA =, , Side opposite to ∠A BC, =, Side adjacent to ∠A AB, , cosecant of ∠A i.e. cosec A =, secant of ∠A i.e. secA =, , Trigonometric Ratios for, Complementary Angles, , Side adjacent to ∠A AB, =, hypotenuse, AC, , tangent of ∠A i.e. tan A =, , AC, hypotenuse, 1, =, =, sine of ∠ A Side opposite to ∠A BC, , AC, hypotenuse, 1, =, =, cosine of ∠ A Side adjacent ∠A AB, , cotangent of ∠A i.e.cot A =, , INTRODUCTION, TO, TRIGONOMETRY, , 4, , side adjacent to ∠A, 1, =, tangent of ∠ A Side opposite to ∠A, AB, =, BC, , (iv) tanA =, , sin A, cos A, , (v) cotA =, , cos A, sin A, , Note:, The values of the trigonometric ratios of an angle do not, vary with the lengths of the sides of the triangle, if the angle, remains same., , sin (90° – A) = cos A, cos (90° – A) = sin A, tan (90° – A) = cot A, cot (90° – A) = tan A, sec (90° – A) = cosec A, cosec (90° – A) = sec A, Note:, Here (90° – A) is the complementary angle of A., , Trigonometric Identities, , (i) sinA.cosec A = 1 (ii) cosA . secA = 1, (iii) tanA.cotA = 1, , 0°, , cosec A, , Side opposite, to angle A, , e, , C, , ∠A, , 5, , An equation involving trigonometric ratios of an angle is, called a trigonometric identity, if it is true for all values, of the angle(s) involved., (i) sin2θ + cos2θ = 1, [for 0° ≤ θ ≤ 90°], (ii) sec2θ – tan2θ = 1, [for 0° ≤ θ ≤ 90°], (iii) cosec2θ – cot2θ = 1 [for 0° < θ ≤ 90°]
Page 9 :
MATHEMATICS, , MIND MAPS, , 9 19, , Mind Map-9, , Angle of Depression, A Horizontal Line D, Angle of, Depression, , s, of, , Building, , ne, Li, t, igh, , 3, , C, , B, , Introduction, The height or length of an object or the distance between, two distant objects can be determined with the help of, trigonometric ratios., , 1, , In the above figure, the line AC, is the line of sight as the observer is, looking downwards from the top of the building at A towards the object, at C. Here angle DAC, so formed by the line of sight with the horizontal,, when the observer is lowering his/her head is called Angle of depression., , SOME APPLICATION, OF TRIGONOMETRY, , C, t, , igh, , s, of, ne, , Li, , Line of Sight and Angle of Elevation, , A O, , Angle of, elevation, Horizontal Line, , B, , C, ht, , ig, fS, , ne, , o, , Pole, , Li, , A, , 2, , B, Horizontal Line, , In the above figure, the line AC drawn from the eye of an observer at A to, the top of the pole ‘C’ is called the line of sight. The observer is looking, at the top of the pole. The angle BAC, so formed by the line of sight with, the horizontal, is called the angle of elevation of the top of the pole from, the eye of an observer., , 4, , D, E, From the above figure, if we want to find the height CD of the pole without, actually measuring it, we need the following information:, (i) Distance ED of the observer from the pole., (ii) the angle of elevation ∠ BAC, of the top of the pole., (iii) the height AE of the observer if it is considerable., Assuming that the above three conditions are known we can determine, the height of the pole in the following way., In the figure, CD = CB + BD. Here, BD = AE, which is the height of the, observer., To find BC, we will use trigonometric ratios of ∠ BAC or ∠A., In ∆ABC, the side BC is the opposite side to the known ∠ A. Now we, use either tan A or cot A, as these trigonometric ratios involve AB and, BC to find BC., BC, AB, or cot A =, , which on solving would give us, Therefore, tan A =, AB, BC, BC. By adding AE to BC, you will get the height of the pole., , EBD_7529, , 18
Page 10 :
20, 10, , MATHEMATICS, , MIND MAPS, , 21, , Mind Map-10, Line and a Circle, P, , A circle is a set of all points in a plane at, a fixed distance from a fixed point in a, plane. The fixed point is called the centre, of the circle. The fixed distance is called, the radius of the circle., , P, , A, , P, , 4, , Introduction, , A, , (i), , No tangent can be drawn from the point lying inside the circle, as shown, in fig. (i)., (ii) One and only one tangent can be drawn from a point lying on the circle,, as shown in fig. (ii)., (iii) Only two tangents can be drawn from an exterior point to a circle, as shown, in fig. (iii)., , B, , Q, , Q, , Q, (i), , (ii), , Number of Tangents from a Point to Circle, , T1, , (iii), , 1, , In Fig. (i), the line PQ and the circle have no common, point. In this case, PQ is called a non-intersecting line, with respect to the circle. In Fig. (ii), there are two, common points A and B that the line PQ and the circle, have. In this case, we call the line PQ a secant of the, circle. In Fig. (iii), there is only one point A which is, common to the line PQ and the circle. In this case, the, line is called a tangent to the circle., , P, , P, , P, T2, (ii), , (i), , 2, , CIRCLES, , 5, , Tangent, A tangent to a circle is a straight line which touches the circle at only one, point. The point where the tangent touches the circle is called point of contact, of the tangent to the circle., A tangent to a circle is a special case of a secant, when the two ends points, of its corresponding chord coincides., Theorem: Tangent at any point on a circle is perpendicular to the radius, through the point of contact., , O, , B, C, A, CB is the tangent to the given circle touching at A and OA is the radius., ∴ ∠OAB = 90°, (i) At any point on the circle there can be one and only one tangent., (ii) The line containing the radius through the point of contact is called the, normal to the circle at the point., , 6, , 3, , Theorem Related to, Length of Tangents, From the External Points, The lengths of tangents drawn from an, external point to a circle are equal., i.e.,, Q, , P, , O, , R, Here, PQ & PR are the two tangents drawn, from P to the circle., Here OP is the angle bisector of ∠QPR, i.e.,, the centre lies on the bisector of the angle, between the two tangents., , (iii), , Length of a Tangent, The length of the segment of a tangent from an external, point to the point of contact with the circle is called the, length of the tangent., , T1, P, T2, In the given figure, T1 & T2 are the points of contact of, the tangents PT1 & PT2 respectively from the external, point P.
Page 11 :
22, , MATHEMATICS, , Mind Map-11, 3, , 1, , Construction, Construction implies drawing geometrical figures, accurately such that triangles, quadrilateral and circles, with the help of ruler and compass., , Division of a Line Segment, A line segment can be divided in a given ratio (both, internally and externally), Example:, Divide a line segment of length 12 cm internally in the, ratio 3 : 2., Solution :, Steps of construction :, (i) Draw a line segment AB = 12 cm. by using a ruler., (ii) Draw a ray making a suitable acute angle ∠BAX, with AB., , X, A5, , 2, , Z, , CONSTRUCTIONS, , A2, A1, 2, P, , B, , (iii) Along AX, draw 5 ( = 3 + 2) arcs intersecting, the ray AX at A1, A2 , A3, A4 and A5 such that, AA1 = A=, A=, A=, A 4 A5, 1A 2, 2 A3, 3A 4, (iv) Join BA5., (v) Through A3 draw a line A3P parallel to A5B, making ∠AA3P = ∠AA5B, intersecting AB at, point P., The point P so obtained is the required point, which, divides AB internally in the ratio 3 : 2., , This Construction involves two different situation., (a) Construction of a similar triangle smaller than the given triangle., (b) Construction of a similar triangle greater than the given triangle., (ii) The ratio of sides of the triangle to be constructed with the corresponding sides of the given triangle is, X, called scale factor., Example:, A', Y, Draw a triangle ABC with side BC = 7 cm. ∠B = 45°, ∠A = 105°. Construct, a triangle whose sides are (4/3) times the corresponding side of ∆ABC., A, Solution :, Steps of construction :, 30°, 45°, (i) Draw BC = 7 cm., C', B, C, (ii) Draw a ray BX and CY such that ∠CBX= 45° and, ∠BCY = 180° – (45° + 105°) = 30°, B1, Suppose BX and CY intersect each other at A., B2, ∆ABC so obtained is the given triangle., B, B4, , A3, , 3, , (i), , 3, , A4, , A, , Similar Triangles, , 4, , (iii) Draw a ray BZ making a suitable acute angle with BC on opposite side of vertex A with respect to BC., (iv) Draw four (greater of 4 and 3 in 4/3) arcs intersecting the ray BZ at B1, B2, B3, B4 such that BB1 = B1B2, = B2B3 = B3B4., (v) Join B3 to C and draw a line through B4 parallel to B3C, intersecting the extended line segment BC at, C′., (vi) Draw a line through C’ parallel to CA intersecting the extended line segment BA at A’., Triangle A’BC’ so obtained is the required triangle., , Tangents to a Circle, Two tangents can be drawn to a given circle from a point outside it., Example:, Draw a circle of radius 4 cm. Take a point P outside the circle. Without using the centre of the circle, draw two, tangents to the circle from point P., Solution :, D, Steps of construction :, (i) Draw a circle of radius 4 cm., T, (ii) Take a point P outside the circle and draw a secant PAB, intersecting, the circle at A and B., B, C, (iii) Produce AP to C such that AP = CP., A, P, (iv) Draw a semi-circle with CB as diameter., (v) Draw PD ⊥ CB, intersecting the semi-circle at D., T�, (vi) With P as centre and PD as radius draw arcs to intersect the given circle, at T and T′., (vii) Join PT and PT′. Then, PT and PT′ are the required tangents., Note:, If centre of a circle is not given, then it can be located by finding point of intersection of perpendicular bisector,, of any two nonparallel chords of a circle., , EBD_7529, , 11, 23, , MIND MAPS
Page 12 :
24, 12, , MATHEMATICS, , MIND MAPS, , 25, , Mind Map-12, Terms Related To Circle, (i), (ii), , Chord: A line segment joining any two points on a circle., Arc: A piece of a circle between two points on the circle, is called an arc., Major Arc, , Circumference and Area, of a Circle, , Circle, , (i), , The set of all points in a plane which are at a fixed, distance from a fixed point in the plane is called, circle. The fixed point is called centre and the fixed, distance is called radius of the circle., , (ii), , O, P, , Q, , Chord, Minor Arc, , The arc less than the semicircular arc is called minor arc, and the one greater than the semi-circular arc is called, major arc., (iii) Sector: The portion of a circular region enclosed by two, radii and the corresponding arc is called a sector of the, circle., , 2, , 1, , 3, , The circumference of a circle is defined as distance, covered by travelling once around a circle and is, given by C = 2πr = πd, where r = radius of the circle and, d = diameter of the circle., The Area of a circle of radius r is given by,, 2 π 2, A = πr = d where, d = diameter of the circle., 4, , Length of an Arc and Area of, Sector, (i), , The length of an arc of a sector of an angle θ is, given by,, θ, l=, × 2πr, O, 360, r, , (iii) Area of a circular ring:, The area of the circular path or ring is given by the, difference of the area of outer circle and the area, of inner circle., Area of circular ring = π(R2 – r2), , r, , �, , R, , (ii), , r, O, , Major, Sector, O, , A, , Minor, Sector, , B, , Sector smaller than the semi-circle is called minor sector, and the sector larger than the semi-circle is called major, sector., (iv) Segment: The portion of a circular region enclosed, between a chord and the corresponding arc is called a, segment of the circle., , 4, , AREAS RELATED, TO CIRCLES, , Area of a Segment, , Major, Segment, O, A, , Minor, Segment, , (i), B, , P, , The segment bounded by the chord and the minor arc, intercepted by the chord is called minor segment and, the segment bounded by the chord and the major arc, intercepted by the chord is called major segment., , 5, (ii), , Area of segment APB, =, Area (sector OAPB), – Area (∆OAB), θ, =, × πr 2 − area of ∆OAB, 360, A, This is the area of minor segment., ∴ area of major segment AQB, =, πr2 – Area of minor segment APB, , B, Perimeter of sector AOB, l, θ, × 2πr, = OA + OB + , AB = 2r +, 360, The area of the sector AOB of angle θ is given by,, θ, = × πr 2, 360°, This is the area of minor sector., ∴ area of major sector AOB, =, πr2 – Area of minor sector AOB, A, , Q, , O, �, B, P, , If θ is the central angle, then the area of segment, APB, θ, θ, θ, =, × πr 2 − r 2 sin cos, 360, 2, 2
Page 13 :
MATHEMATICS, , MIND MAPS, , 13 27, , Mind Map-13, Surface Areas and, Volumes of Solids, Cuboid:, Volume = l × b × h, h, Total surface area, = 2[lb + bh + hl ], b, l, Lateral surface area, = 2[bh + hl], Diagonal of the coboid = 2 + b 2 + h 2, (ii) Cube:, Volume = a3, a, Total surface area = 6a2, a, Lateral surface area = 4a2, a, r, 3a, Diagonal of a cube =, (iii) Cylinder:, h, (a) Right circular cylinder:, 2, Volume = πr h, Curved Surface Area = 2πrh, Total Surface Area= 2πrh + 2πr2 = 2πr(r + h), (b) Right circular hollow cylinder:, R, Let r and R, be internal & external radii., r, Volume = π(R2 – r2)h, Curved Surface Area = 2π(R + r)h, Total Surface Area = 2π(R + r)h + 2π(R2 – r2), =2π(R + r)(h + R – r), (iv) Right circular cone:, (i), , 2, , Slant height, l = r + h, , 2, , 1 2, πr h, 3, Curved Surface Area = πrl, Total Surface Area = πrl + πr2, Volume =, , l, , 1, , 3, , Surface Areas, and Volumes, 2, , 6, , Surface Areas of a, Combination of Solids, , Volume of a, Combination of Solids, , The surface area of a solid which is a combination of two or more solids, is calculated by adding the surface areas of the individual solids which, are visible in the new solid formed., For Example:, , Whenever solid is formed by combining, two or more solids, then the amount of, matter present in the new solid is equal, to the sum of amounts of matter in the, constituting solids. Volume of new solid, = sum of the volumes of the individual, solids, , If we consider the surface of the newly formed object as given in the, figure above, we would be able to see only the curved surfaces of the two, hemispheres and the curved surface of the cylinder., So, the total surface area of the new solid is the sum of the curved surface, areas of each of the individual parts. This gives, TSA of new solid = CSA, of one hemisphere + CSA of cylinder + CSA of other hemisphere, , Frustum of a Cone, , Surface Areas and Volumes of, Sphere and Hemisphere, (i), , 5, , When we slice (or cut) through a cone with a plane, parallel to its base (see below figure ) and remove the, cone that is formed on one side of that plane, the part, that is now left over on the other side of the plane is, called a frustum of the cone., , Conversion of Solid form, One Shape to Another, (i), , h, r, , Sphere:, , 4 3, ≠r, r, 3, Surface area =4πr2, (ii) Hemisphere:, 2, r, Volume = ≠r 3, 3, C.S.A = 2πr2, T.S.A = 3πr2, (iii) Hemispherical shell:, R, r, 2, 3, 3, Volume = π( R − r ), 3, Curved Surface Area = 2π (R2 + r2), Total Surface Area = 2π (r2 + R2) + π (R2 – r2), = π (r2 + 3R2), Volume =, , 4, , A cone sliced, by a plane, parallel to base, , (i), , (ii), , The two parts, separated, , Volume of the frustum of cone, 1, = πh(r12 + r22 + r1r2 ), 3, C.S.A. of the frustum of cone, = π(r1 + r2)l,, 2, , where l = h + (r1 − r2 ), , 2, , (iii) T.S.A. of the frustum of cone, l = h 2 + (r1 − r2 )2, , Frustum of a cone, , (ii), , When a solid is converted from one shape to other,, then its volume remains same only its shape and, size changes., If a solid is converted into a number of small, identical solids, then Number of small items, =, , r2, h, r1, , l, , Volume of larger object, Volume of smaller object, , EBD_7529, , 26
Page 14 :
14, 28, , MATHEMATICS, , MIND MAPS, , 29, , Mind Map-14, Basic Terms, Class limits : Suppose marks obtained by all of the, students are divided into class intervals 25 – 35, 35 – 45, and so interval on., In class interval 25 – 35, 25 is called lower class limit, and 35 is called upper class limit., Class size : The difference between upper and lower, class limit., Class mark: It is given by, 1, × (Upper class limit +Lower class limit), 2, , Ungrouped and, Grouped Data, The data obtained in original form are called raw, data or ungrouped data., To put the data in a more condensed form, we, make groups of suitable size, and mention the, frequency of each group. Such a table is called, grouped frequency distribution table, and the, data so obtained is called grouped data., , 2, , Where ‘ fi ’ is the frequency corresponding to the, class mark ‘xi’, (ii) Assumed mean method:, ∑ fi di, Mean ( x ) = A +, ∑ fi, ,, where A is assumed mean & di = xi – A, (iii) Step deviation method:, ∑ fi ui ,, Mean ( x ) = A + , h, ∑ fi , xi − A, and ‘fi ’ is the frequency, h, corresponding to the class mark ‘xi’., where ui =, , (i), , th, , average of n , 2, , (i), , (ii), , For Ungrouped Data:, The mode is that observation which occurs most, frequently, i.e, an observation with maximum, frequency., For Grouped Data:, f1 − f 0, Mode = l +, × h, where, 2 f1 − f 0 − f 2, l = lower limit of the modal class,, f1 = frequency of the modal class,, f2 = frequency of the class suceeding the modal class,, h = size ofthe class interval,, f0 = frequency of the class preceeding the modal class., The class with the maximum frequency is called, modal class., , 6, Cumulative Frequency, Curve (Ogive), (i), , For Grouped Data:, , , × h, where, , , (ii), , l = lower limit of the median class,, c.f = cumulative frequency of the class proceeding the, median class,, f = frequency of the median class,, h = class size,, n = number of observations., The class whose cumulative frequency is greater than, n, is called median class., (and nearest to), 2, , Mode, , 3 Median = Mode + 2 Mean, , th, , n, and + 1 observations., 2 , , n, − cf, Median = l + 2, f, , 4, , 3, , th, , n +1, If number of data n is odd, then the median is , , , 2 , observation., If number of data n is even, then the median is the, , (ii), , Relationship Between Mean,, Mode and Median, , For Ungrouped Data:, Arrange the data in ascending order., , STATISTICS, , For Ungrouped Data:, Consider ‘n’ observations in ungrouped data as: x1,, x2, x3,............, xn. The mean of these observations, is:, Sum of the value of all observations, Mean =, ., Total number of observations, å xi, Or, x=, x, Direct method:, ∑ xi fi, Mean ( x ) =, ∑ fi, , Median is a measure of central tendency which gives the, value of the middle-most observation in the data., , 5, , 1, , Mean, , (i), , Median, , The smooth free hand curve is formed, by joining the points (xi, fi) where xi is, the upper limit of a class and fi is the, corresponding c.f. The curve so obtained, is called a cumulative frequency curve,, or an ogive of the less than type., The smooth free hand curve is formed, by joining the points (xi, fi) where xi is, the lower limit of a class and fi is the, corresponding c.f. The curve so obtained, is called a cumulative frequency curve,, or an ogive of the more than type., , 7, , Median by Graph, (i), , 8, , (ii), , Draw the ogive of the less than type and ogive of the more than type on the same axis. The two, ogives will intersect each other at a point. From this point, if we draw a perpendicular on the x-axis,, the point at which it cuts the x-axis gives us the median., Draw the ogive of the less than type, then locate n on the y-axis (n = number of observations)., 2, From this point on y-axis, draw a line parallel to x-axis cutting the less than ogive at a point., From this point draw a perpendicular on the x-axis, the point at which the perpendicular cuts the, x-axis gives us the median.
Page 15 :
30, , MATHEMATICS, , Mind Map-15, Probability - An Experimental, (Empirical) Approach, Let n be the total number of trials. The empirical, probability of an event E happening, is given by, Number of trials in which the event happened, P(E) =, The totaal number of trials., , Probability of Impossible and, Sure Events, , 4, , 1, , The probability of an event which is impossible to occur, is 0 and such an event is called impossible event., i.e; for impossible event ‘I’, P(I) = 0, The probability of an event which is sure or certain to, occur is 1 and such an event is called sure event or, certain event., i.e; for sure event or certain event ‘s’, P(s) = 1, , Rational Numbers and Their, (i), , Experiment : An operation which can produce, some well defined outcomes is known as, experiment, (ii) Trial : Performing of an experiment is called trial., (iii) Equally likely outcomes : Outcomes of trial are, equally likely if there is no reason to accepect one, in preference to the others., (iv) Sample space : The set of all possible outcomes, of an experiment is called sample space., (v) Elementary event : An event having only one, outcome, Note that the sum of probabilities of all the, elementary events of an experiment is 1., , 2, Range of the Probability, of an Event, , PROBABILITY, , From the definition of the probability P(E), we see that, the numerator (number of outcomes favourable to the, event E) is always equal or greater than 0 but less than, or equal to the denominator (the number of all possible, outcomes). Therefore,, 0 ≤ P(E) ≤ 1, , 5, , 3, 6, , Probability - A Theoretical Approach, (Classical Probability), If an event ‘A’ can happen in ‘m’ ways and does not happen in ‘n’ ways, then the, probability of occurence of event ‘A’ denoted by P (A) is given by, Number of favourable outcomes m, Number of favorable outcomes, m, =, P(A) =, Number of all possible outcomess m + n, and the probability of not happening of A, denoted by P(A) is given by, P(A) =, , n, Number of unfavourable outcomes, =, m+n, Number of all possible outcomes, , Complementary Events, The event representing (‘not E) is called the complement, of event ‘E’ and we say that the events E and E are, complementary events,, P( E ) + P( E ) = 1, OR, P( E ) = 1 − P( E ), , EBD_7529, , 15, 31, , MIND MAPS